One of my first posts was about the inverted pendulum and in it I promised a follow-up that I never delivered. So here it is. I commented that for all there is a lot of talk about the inverted pendulum there is little understanding of what it is and what it’s characteristics are. I’ll focus on the kinetics today.
The graph below shows the vertical component of the ground reaction under an inverted pendulum (Anderson and Pandy, 2006). You can work out the shape the curve must have from basic physics. Early on the pendulum is rising as it moves towards the vertical. As it is does so it gains potential energy and must be losing kinetic energy. Its upward velocity is thus reducing so it has a downward acceleration (i.e. an upward deceleration). If the overall force is acting downwards then the ground reaction (up) must be less than bodyweight (down). As the pendulum moves towards its highest point along a circular arc it rises less slowly, decelerates less, so the ground reaction must get closer to bodyweight.

Once it is over the highest point it starts to lose height, and accelerate downwards. Again this requires a downwards force so again the ground reaction (up) must be less than bodyweight (down). The further the mass goes around the circular arc the more quickly it loses height, the more it accelerates, so the ground reaction must be a decreasing fraction of the ground reaction. Easy eh! Appliance of science and we can predict the curve above.
The interesting thing here is that the vertical component of the ground reaction under an inverted pendulum is always less than its own weight. The inverted pendulum may be an excellent mechanism for carrying a mass from one point to another but its a pretty hopeless one for supporting that mass. On reflection this should be obvious because the vertical component of velocity is upwards at the start and downwards at the end and thus the nett acceleration during the movement is downwards and the average force must be less than bodyweight.
If the average force is less than bodyweight then you can’t possibly have a viable walking pattern simply by stringing a series of inverted pendulums together no matter how good the drawings of the kinematics look.
There are two mechanisms by which we get over this. The first is that we use our muscles so that the the ground reaction does not just mimic the mechanics of a passive inverted pendulum. In the figure below the ground reaction is under an inverted pendulum (solid line) is plotted against Winter’s data (1991) for the vertical component of the ground reaction (grey band) from the middle of one double support phase to the next. The characteristics double bumps of the ground reaction clearly increase the average vertical force (all forces are plotted as % bodyweight).
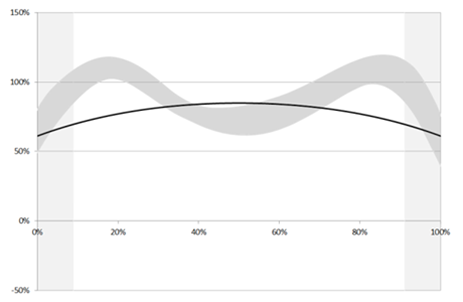
This isn’t the whole story however. If you look more critically at this data you will see that the average vertical component of the ground reaction under the body is still considerably less than bodyweight (about 10% less) for most of us. The peaks aren’t much higher than bodyweight and they don’t last that long. How can we walk around and not support out own bodyweight?
The answer lies in two words, “double support”. During double support the forces under both limbs combine to exceed bodyweight. The largest total vertical component of the ground reaction is actually in mid double support when relatively modest looking ground reactions under both limbs combine (you can see a graph of this in an earlier blog). By allowing the two ground reactions to combine like this we are able to rely on an inverted pendulum like movement to move the body forwards whilst achieving an average total ground reaction equal to bodyweight – a fundamental pre-requisite of cyclic walking.
A double support phase is thus an essential requirement of a gait pattern based on an inverted pendulum. It’s interesting that modelling the body as a simple inverted pendulum leads to a prediction that double support needs to last for 15% of the gait cycle. The actual value is, of course, 10%. That’s not a bad guess for such a simple model.
I put these ideas in a slightly wider context in one of the screencasts in the series “Why we walk the way we do. The whole series is linked to on my Videos page.
.
Anderson, F. C., & Pandy, M. G. (2003). Individual muscle contributions to support in normal walking. Gait Posture, 17(2), 159-169.
Buczek, F. L., Cooney, K. M., Walker, M. R., Rainbow, M. J., Concha, M. C., & Sanders, J. O. (2006). Performance of an inverted pendulum model directly applied to normal human gait. Clin Biomech (Bristol, Avon), 21(3), 288-296.
Winter, D. (1991). The biomechanics and motor control of human gait: Normal, Elderly and Pathological (2nd ed.). Waterloo:: Waterloo Biomechanics.
