I’ve just noticed that my blog is still displaying its Christmas card which feels a bit poor as we move into February. Thought I’d reflect on an issue that came up just before Christmas when we were looking at some joint power data from a cohort of amputees. My colleague first presented the data in “components” in the different planes. I commented that I regarded this as wrong and asked her to plot out the total joint power. She came back to me a little later to say that she couldn’t see how to compute this directly within Visual3D. This caused us to look at their wicki which appeared to confirm what she had found with an explanation that this is how joint power was presented in Move3D, the software out of which Visual3D evolved, and that this “has become common in the biomechanics community”. My initial reaction was that “common in the biomechanics community” does not necessarily correlate with “correct”. To do Visual3D justice, the wicki also points out that you can calculate total power from its “components” but not vice versa which at least makes sense, even if you question how appropriate it is to refer to these as “components” . (Rather bizarrely feedback from C-motion after publication of this post makes it clear that a JOINT POWER SCALAR function has been available in the software for quite a long time as well as the original calculation of “components” and it was the wicki that was/is misleading! The original wording of this paragraph has been modified in acknowledgement of this).

The confusion is quite widespread. When Vicon first produced Polygon it only allowed a graphing of total power and then one day I noticed an option to plot the different “components”. I dropped them an e-mail pointing out the mistake and was told that it wasn’t a mistake but a feature that a number of their customers had requested. It was clear that consumer demand was a more important driver of product development than the rigour of the biomechanics!
So what is the issue? As defined in physics, power is what we call a scalar, it cannot be related to any particular direction or plane. Think of it as a bit like your age, another scalar, it doesn’t really make any sense to talk about having age in a particular direction or plane does it. Well, to the classically trained physicist (me!) then talking about sagittal plane power doesn’t make any more sense than talking about sagittal plane age!
Or is it that simple? The quantities in physics that are related to direction are called vectors (position, speed, acceleration are common examples in biomechanics). Vectors are generally represented as a set of three number which are the components in a particular direction. Thus speed (v) is written (vx, vy, vz) with vx representing the component of speed in the x-direction. Joint power is the product of two such vectors, moment (mx, my, mz) and angular velocity (ωx, ωy, ωz) and under the laws of vector multiplication this gives the equation:
P = m.ω = mx ωx+my ωy.+mz ωy
and, although the physicist doesn’t think it has any significance, it is clear that the total power does appear to be made of three separate terms that involve quantities measured along different directions. It is these three terms that have come to be known as the “components” of power. (Notice that throughout this article I’ve put putted inverted commas around “component” when I’ve used it differently to the conventional definition in physics).
So if it is very clear what the terms mean, does it matter if we just choose to use it even if the physicists don’t think we should? I think the answer to this is “yes, it does matter” (I would though, I’m trained as a physicist). To me the whole point of biomechanics is that it allows us to understand the way the body works using rules and relationships that have been developed in the context of wider physics and engineering and which we know are true in all practical circumstances. If we start using terms which are not part of that understanding, no matter how convenient, then we lose that guarantee that they relate to each other in any particular way. It may seem sensible when you set out, but sooner or later it will lead you into trouble.
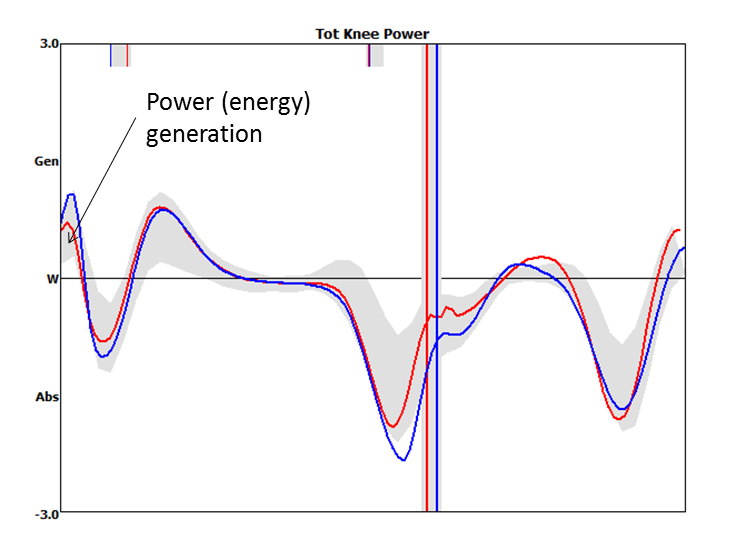
Power, in this context for example, is the amount of energy generated in a given time. The “components” of power (e.g. mx ωx ) can be negative as well as positive so if, for example, the x “component” is positive and the y and z “components” are negative, then the amount of energy generated in a given time in the x plane (if this is how it is regarded) is greater than the total energy generated in all the planes. This just doesn’t make sense. Are we saying that power is being generated at a joint in one plane at the same time as it is being absorbed in the other planes?! I hope even the non-physicists who read this can appreciate the problem.
The problem with calculating and using “components” of joint powers is that we don’t know under what other circumstances they lead us to nonsensical conclusions. Stick to the rules of physics and we know our conclusions will always be valid (as long as we’ve applied them properly of course!)
One defence of “sagittal plane joint power” which I have a little sympathy with is that, because the components of both angular velocity and moment tend to be considerably greater in the sagittal plane than others, the “sagittal plane joint power” is generally quite a good approximation to the total joint power. Given that in the modern world all these numbers just pop out of the computer anyway though its not at all clear how this is useful. If you want to know the total joint power why not calculate the total joint power? You also need to be careful that if you justify “sagittal plane power” as a good approximation to total joint power, then all you can really say about the transverse and coronal “plane powers” is that they represent the error in this approximation. Attributing physical significance to poorly defined error terms in a calculation is always going to end in tears.
In passing it may be worth commenting that kinetic energy can also be defined as a product of two vectors,
KE = ½mv.v = vx vx+vy vy.+vz vy
but I’ve never heard anyone talking of kinetic energy having components in different directions!