Hi, sorry I’ve been away for so long. How very Australian of me to take all of January off!
We’ve started a new semester on the MSc programme its called “Healthy walking” and for this two weeks the students are working through my video series “Why we walk the way we do“. I’ve also been preparing some study material to support this. In doing this I’ve become even more convinced than ever that the conventional understanding of first double support as a phase of shock absorption is wrong.
Of course one of the old chestnuts that follow from that theory is that stance phase knee flexion is a mechanism to absorb the shock of impact. I’ve been thinking about this for sometime but it wasn’t until I was preparing this material last week that it struck me that it would be useful to look at the knee power graph. Why? – because if there is one thing that shock absorbers do it is absorb energy. You can make an argument that this is all they do. So if the knee is a shock absorber and we look at the knee power graph immediately after foot contact we should expect to see power absorption.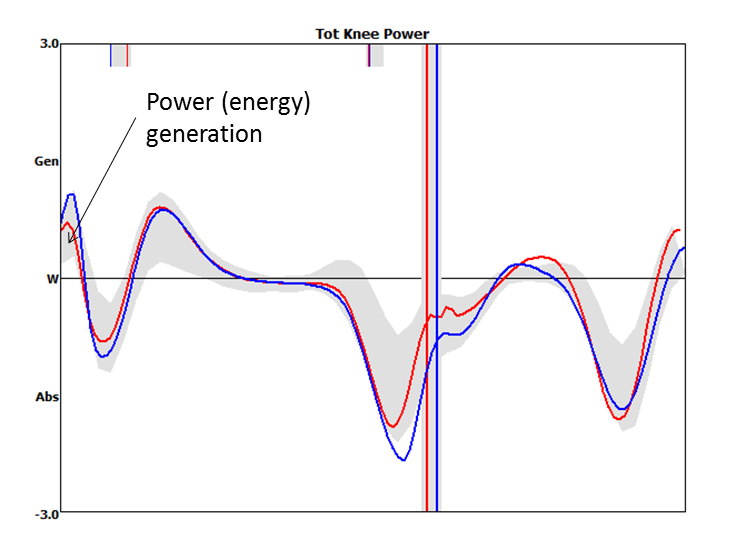 If you look at the graph you’ll see quite the reverse. Immediately after foot contact the knee is generating power – this is not the action of a shock absorber.
If you look at the graph you’ll see quite the reverse. Immediately after foot contact the knee is generating power – this is not the action of a shock absorber.
In case anyone thinks this is just my data we can go to David Winter’s book (1991, figure 4.34b):
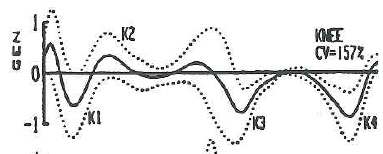
This is interesting because the early power generation peak is definitely there but Winter seems to ignore it. He starts numbering at the power absorption peak in late double support that extends into early single support (K1). Its almost as if he can’t bring himself to admit that it’s there – perhaps he was a shock absorption theorist and this didn’t fit in with his world view?
Kirtley (2006) admits the peak is there and even labels it Ko. He claims however that it is an artefact of the filtering. This claim is unreferenced but I think refers to the work of Bisseling and Hof (2006) which was drawn into a discussion on K0 on the old CGA web-site. I’m not convinced. I don’t think anyone doubts that the ground reaction is anterior to the knee in the first half of double support and the knee is clearly flexing at this point. The inevitable consequence of the combination of these two observations is that power (moment . joint velocity) must be generated. The knee is not acting as a shock absorber.
Putting it another way the knee moment graph clearly shows that the knee flexors are the dominant muscle group at the knee for the first half of double support whereas the knee extensors would have to be dominant for knee flexion to have the capacity to absorb shock.
Of course from about half-way through double support power is absorbed at the knee but this is about 50msec after foot contact which is too long after contact for this to be a consequence of a mechanical “shock” at the time of contact.
On the balance of evidence I’m more and more convinced that stance phase knee flexion is not a shock absorbing mechanism. But if it’s not to absorb shock – what is it for?
.
Bisseling, R. W., & Hof, A. L. (2006). Handling of impact forces in inverse dynamics. J Biomech, 39(13), 2438-2444.
Kirtley, C. (2006). Clinical gait analysis (1st ed.). Edinburgh: Elsevier.
Winter, D. (1991). The biomechanics and motor control of human gait: Normal, Elderly and Pathological (2nd ed.). Waterloo:: Waterloo Biomechanics.
Winter, D. A. (1992). Foot trajectory in human gait: a precise and multifactorial motor control task. Phys Ther, 72(1), 45-53; discussion 54-46.

Hi Richard. Could it be to ‘pull’ the body forward i.e. increased friction under the foot?
Interesting comment. I tend to think my biomechanics through “bottom-up” in which case it’s quite difficult to see this but if you work “top-down” then, yes, knee flexion will “pull” the foot back. This would increase the anteriorly directed component of the ground reaction which would accelerate the centre of mass forwards. The devil is in the detail though as the extent to which the anterior component of the ground reaction can be increased will be dependent on some subtle factors related to the system inertia.
At one level this might lead us to expect to see an anteriorly directed ground reaction immediately after heel strike. Glossing through the literature I have to hand Whittle suggests such an anteriorly directed ground reaction over the first 5% of the gait cycle but all other normative data I can find (Gage, Perry, our own) suggests the force is consistently posteriorly directed. That is not the end of the story however, as the “natural” ground reaction under a simple inverted pendulum is posteriorly directed as the pendulum is rising (it must be as the, pendulum is decelerating). “Pulling” the foot back might therefore reduce the posteriorly directed ground reaction rather than giving rise to an anteriorly directed one. It would still have the effect of allowing the centre of mass to move forwards more easily than it would otherwise have done.
Take step further back and look at the problem more simply. All if this data is a tied to the ground reaction force present to during walking. This force has an effect on every joint in the Jody as well as the body balance as a whole. The point of application of the grf is the center of pressure. More specifically look at the center if pressure data with respect to the foot, ankle, knee, as well as com. You can then also look at the data concerning grf direction relative to these locations as well (any knee moment data). This might take more of a mechanical approach to the problem to understanding whether the muscle activation at KO is more due to cp and grf control to ensure balance or shock absorption.
Some good follow up reads might be Herr’s work on angular momentum during and Kreg Gruben’s work on the same topic.
I have am interesting view on this topic as I completed my Ms in Kreg’s lab.
Let’s keep the discussion going!
Tony
I still think it’s an artifact, Richard. The center of pressure calculation is likely to be way off until a decent amount of weight is put on the stance foot, making inverse dynamics very dodgy in those first few milliseconds. I guess that’s what Bisseling says, though I haven’t read the paper. As you say, we did have a long discussion about it at: http://www.clinicalgaitanalysis.com/teach-in/transient/
Yes, well this is one of the connundrums of those pesky inverse dynamic equations vs. what we think should be going on based on visual inspection and deductive reasoning. I always had a tough time explaining that spike to interested engineering students. Chris, if it is artifact, why is it so consistent torwards power generation? Should’nt we expect the dispersion to be more randomly distributed around zero? Or is this just because we are coming from terminal swing, which for whatever reason, the model outputs a slight generating power.