I’ve just been reviewing some of my earliest posts from when I first started this blog which were a discussion of the relative merits of the GDI and GPS and recognise that there is a little unfinished business. In the last of those posts I talked of the equations that allow a conversion between GPS and GDI that Mike Schwartz and I were intending to present at GCMAS last year. I didn’t include them in the blog at the time because it seemed appropriate to make the conference presentations first. In fact we presented similar papers at both GCMAS and ESMAC.
The basis of this is to acknowledge that both GPS and GDI are essentially measures of the RMS difference between two traces. GPS is a direct calculation and GDI first expresses the data as a linear combination of gait features. If this was all that was done then the RMS difference would be identical but the GDI uses only the first 15 features which results in a small difference. If we used the direct RMS differences between the two curves but applied the same scaling as the GDI we would have another measure which we’ll call GDI* which is very close in value to the actual GDI. You can see how close the agreement is from the figure below.
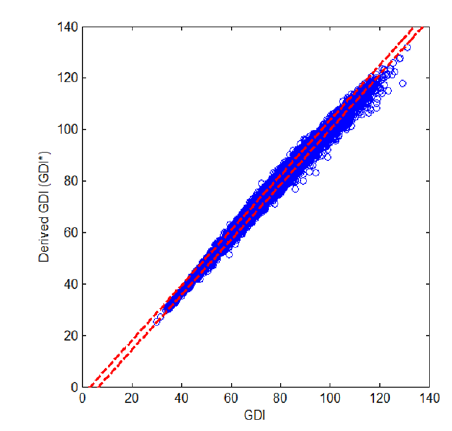
Scatter plot of derived GDI (GDI*) against original GDI. GDI* = -6.6+1.1*GDI, r2=0.996.
A new method for computing the Gait Deviation Index and Motion Analysis Profile, Schwartz MH, Rozumalski A, Baker, R. Proceedings of the Gait and Clinical Movement Analysis Society, Cincinnati, 2013.
If we do this then we can also write down equations that allow a conversion from GDI* to GPS which will also be a very good approximation to the relationship between GDI and GPS. These are:

where A=mean(ln(ΔRMS)) and B=sd(ln(ΔRMS)) calculated over the control group used for the computation. In this case the values are A=1.677 and B=0.263. So there you go. If you want to compare your results for GDI and GPS you can now just use these equations to convert one to the other.
As a final note for Visual3D users you might be interested to know that the C-Motion web-site now includes a tutorial on how to create a pipeline to calculate the GPS. It’s all gobbledygook to me. I’d be interested to hear of anyone who may have used it though.
Have a happy Christmas. I think its unlikely I’ll get another post out before next Wednesday now and even less likely that anyone will be interested in reading it if I did.

For users who want to compute GDI in Vicon Nexus directly, here is the spreadsheet (with the macro included) you can use with PECS : http://ucamm-boislarris.megrot.com/Mise-a-jour-du-Gait-Deviation (in french but easy to use)
The same type of spreadsheet for GPS will arrive soon. stay tuned 🙂
First of all thanks for your descriptions and posts, they are really useful. I’m visual 3D user but still could not implement the GPS on my pipelines..
Richard, many thanks for your useful blog. In reading your paper in G&P on the GPS and MAP, it mentioned you were working on some software to generate these. Is this software available anywhere? Thanks