I think this will be my last post focussing on the inverted pendulum. In the first I gave a brief overview and in the second I looked at the vertical component of the ground reaction. The anterior component is also very interesting (well at least I think so).
You’ll remember that the inverted pendulum is a mechanism that allows a mass (body) that has some initial kinetic energy to move in a circular arc over the pivot (foot). Early on the centre of mass is rising, gaining potential energy and thus, in a conservative system, must be slowing down. If it is decelerating in the horizontal direction then a force must be acting in the horizontal direction to cause this. The only force acting on the mechanism in this direction is the ground reaction so it must be directed posteriorly. As the mass approaches its high point it gains height, and thus loses speed, more slowly so this force must reduce and will be zero when the mass is at its high point. After this it starts to descend, loses potential energy and must speed up. If the mass is accelerating in the horizontal direction then a force must be causing this. During this phase the horizontal component of the ground reaction must be anterior. In qualitative terms, therefore, the horizontal component of the ground reaction under a passive inverted pendulum is predicted to be the same as that under the foot during walking.
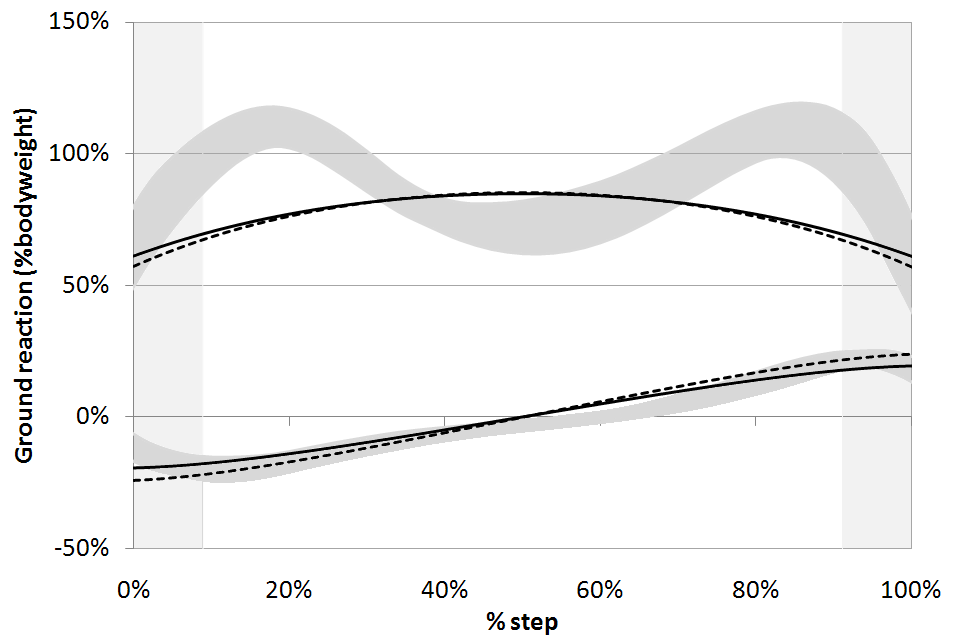
Curve in top half is vertical component and lower down is the horizontal components
The graph above shows the results of a quantitative analysis using sensible figures for mass (the dashed line shows the effect of a including a non-zero moment of inertia), leg length and initial velocity. I’ve only plotted this from middle of first double support to the middle of second double support as this is the period of the gait cycle that the inverted pendulum models.
Although (as commented on in the previous post) the vertical component of the ground reaction is quite different from the predictions of the inverted pendulum the horizontal component is nearly identical. We thus reach the conclusion that a completely passive mechanism (a stick with a weight on one end) generates almost exactly the same horizontal forces as we do when we are walking.
This is quite interesting in the context of the argument about whether the foot is “lifted off” or “pushed off” in second double support. On the basis of the horizontal component of the ground reaction it is clearly pushed off, but only to the extent that it would be if the leg was a completely passive mechanism.
It’s also interesting to think about this in the context of induced acceleration analysis. Because the underlying skeleton is unstable any induced acceleration analysis (e.g. Liu et al., 2006) will attribute the majority of the ground reaction to muscle forces. Interpreting what each muscle is doing and what clinical implications this has is quite complex. Thinking about the kinetics of the inverted pendulum, however, leads to the conclusion that the muscles are acting primarily to maintain the length of the limb and enable it to perform as an inverted pendulum would. It may be that this understanding leads to clearer clinical interpretation.
It certainly helps with the interpretation of the rather counter –intuitive finding of Liu et al. that the gluteus medius contributes to forward progression. In order for the body to move as an inverted pendulum it is important that trunk is not allowed to fall in relation to the hip and it is the gluteus medius that contributes that stability. The gluteus medius thus contributes to forwards progression by maintaining stability and allowing the passive dynamics of the inverted pendulum to do its business.
At the ankle and knee during late single support and second double support there is the added complexity of preserving the integrity of the inverted pendulum at the same time as allowing knee flexion to start in preparation for swing. Flexing of the knee alone would allow partial collapse of the pendulum but plantarflexing the ankle (reducing dorsiflexion) at the same time allows the overall length of the limb to be maintained. It is the plantarflexors that are required for this and, as might be expected, the induced acceleration shows these muscles as the primary contributors to the anterior component of the ground reaction through this period.
.
Liu, M. Q., Anderson, F. C., Pandy, M. G., & Delp, S. L. (2006). Muscles that support the body also modulate forward progression during walking. J Biomech, 39(14), 2623-2630.

Hi,
Thank you for the interesting articles on your blog.
I have for some time studied this topic, but then i relation to running, and how the inverted pendulum model, or in other terms “gravitational torque”, can be seen as providing the energy for the forward (obviously not horizontally) in running. The use of the inverted pendulum model seems not to be controversial, and widely accepted, as a model useful for understanding, and even practical application relating to, walking, but this is not the case for understanding running, where a “push forward” kind of model seem to be the widely accepted model. After examining all the counter arguments to the use of a “gravitational torque” (GT) model, I can not conclude otherwise than that all the counter arguments are empirically wrong, and that it is quite easy to show this. And I am working on writing something on this. At the moment there are quite few people who seem to be giving this issue much thought, or are even aware of the issue. And mostly the GT model of running is somewhat ridiculed, even though it is mostly not well understood.
Could you give your thoughts on this, and my above observations about the current state of the understanding of walking, and running?
Thanks.
Hans
Hans,
My background is as a clinical gait analyst and the study of patients who, most of the time, walk more slowly than other people. I’ve actually spent very little time looking at or thinking about running. I’ve always assumed that running would be better modelled by a spring mechanism than a simple inerted pendulum. I know various people have looked at the spring loaded inverted pendulum but am not sure of of how that relates to some of the variants you’ve mentioned in your comment.
Sorry this isn’t more helpful.
Richard
Hi. Thank you for the reply. A spring loaded inverted pendulum is actually a good description of what I am thinking about.
All the best
Hans